Video 1:
Reinforcement Learning for shepherding control in multi-robot systems: 1 herder - 1 target case
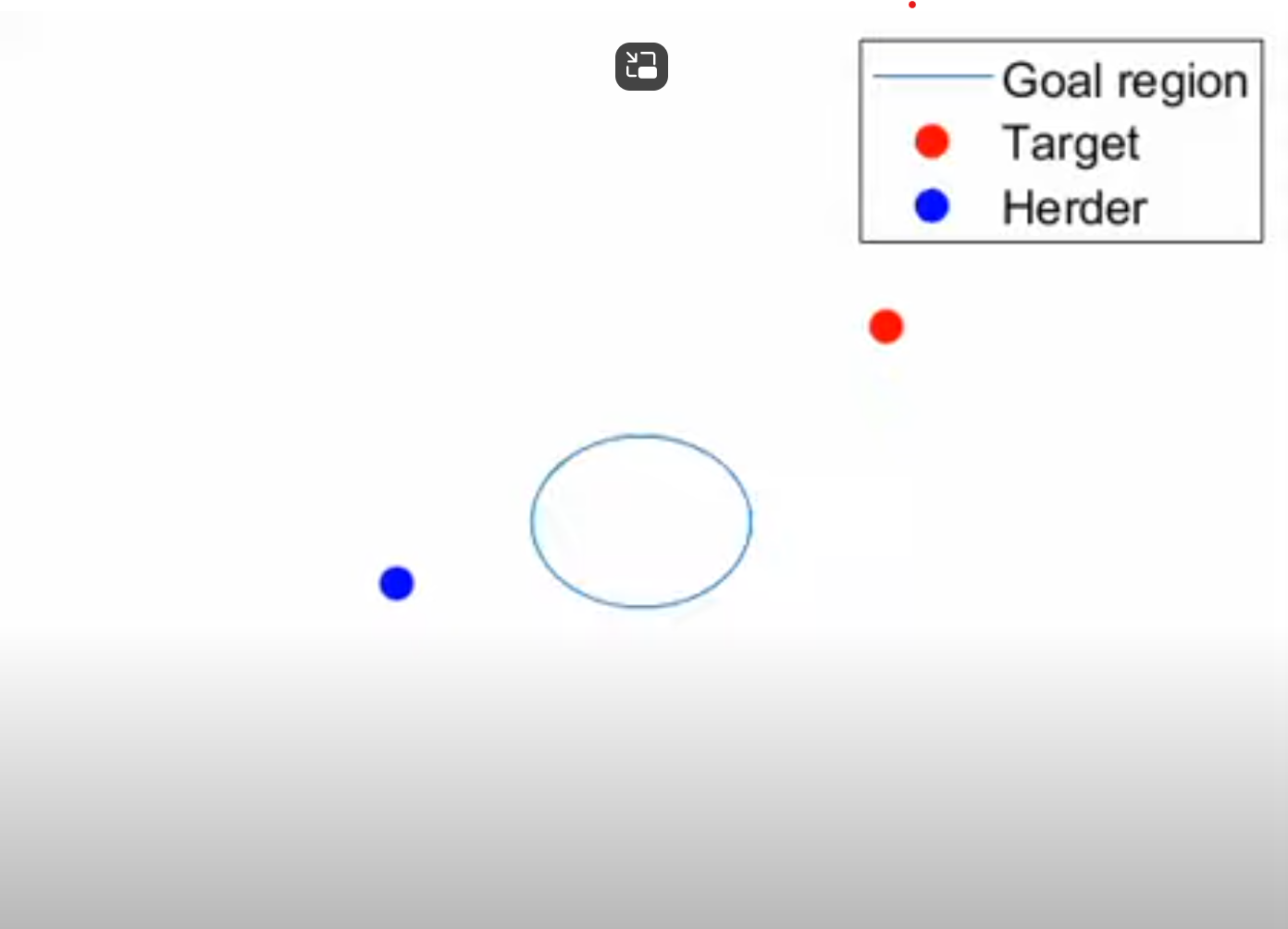
Description: A single herder needs to guide and contain a target in a goal region. Solution provided via Deep Q-learning.
Video 2:
Reinforcement Learning for shepherding control in multi-robot systems: 2 herders-5 targets case
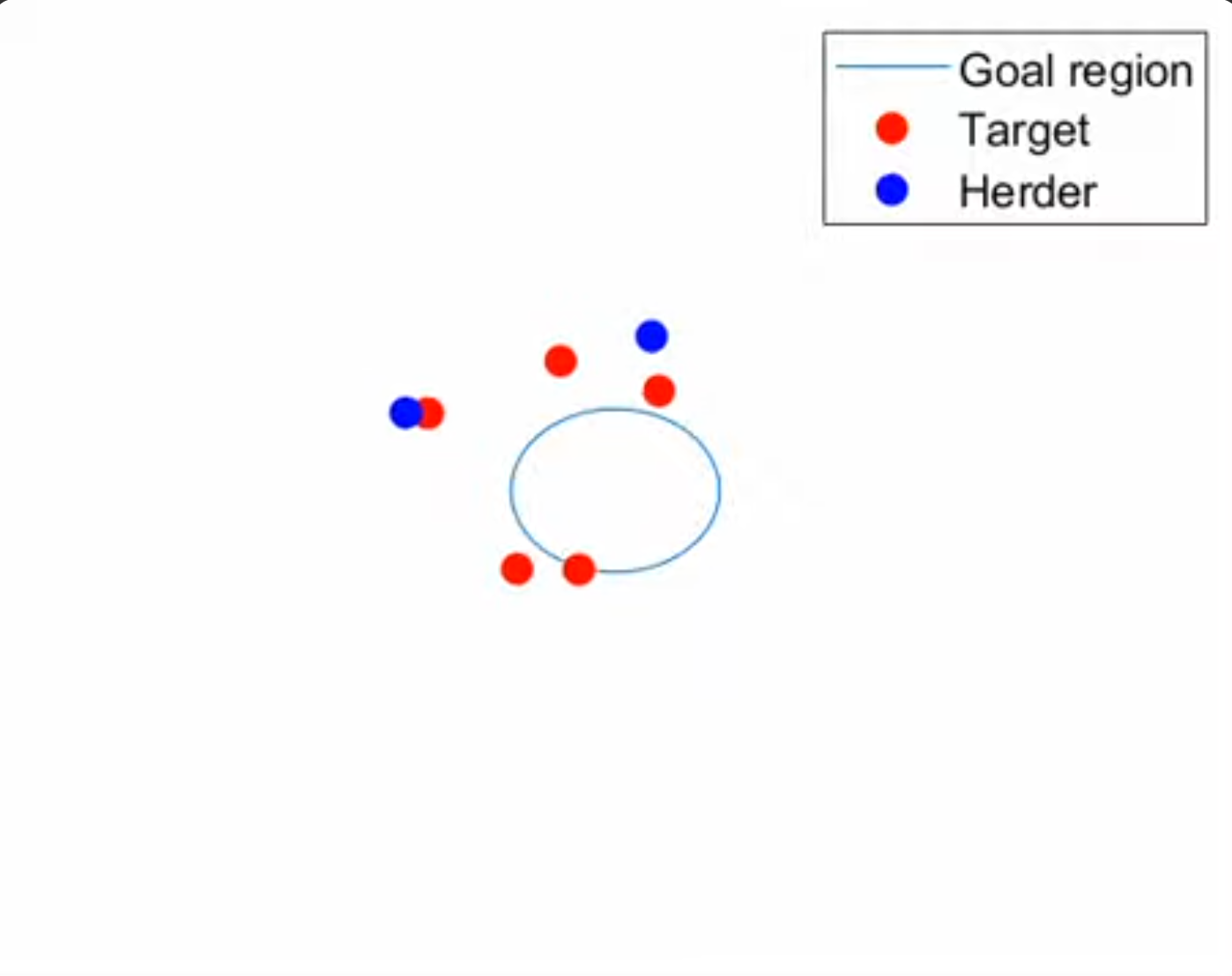
Description: Two herders cooperate to corral and contain 5 targets in a goal region. Solution provided via independent Deep Q-learning with parameter sharing.
Video 3:
Reinforcement Learning for shepherding control in multi-robot systems: 10 herders-100 targets case
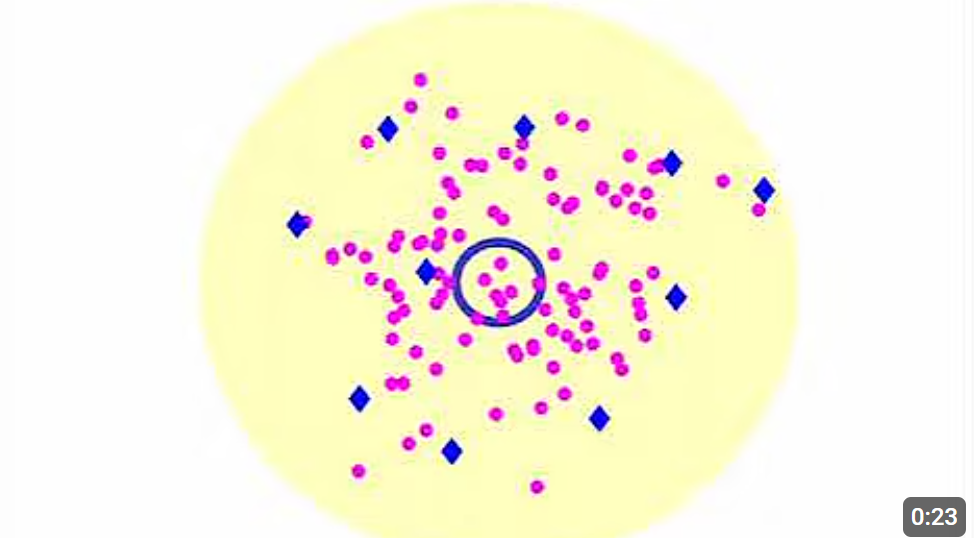
Description: Ten herders cooperate to corral and contain 100 targets in a goal region. Solution provided exploiting a 2H-5T Deep Q-network using topological sensing.